Folder structure
The Great Outdoors Dataset
├── pt_test.lst
├── pt_val.lst
├── pt_train.lst
├── 00000
├── os1_cloud_node_kitti_bin/ -- directory containing ".bin" files with Ouster 64-Channels point clouds.
├── nav_radar_node/ -- directory containing radar polar images.
├── pylon_camera_node/ -- directory containing ".png" files from the color camera.
├── pylon_camera_node_label_color -- color image lable
├── pylon_camera_node_label_id -- id image lable
├── lwir_camera_node/ -- directory containing ".png" files from the thermal camera.
├── lwir_camera_node_label_color -- color image lable
├── lwir_camera_node_label_id -- id image lable
└── poses.txt -- file containing the poses of every scan.
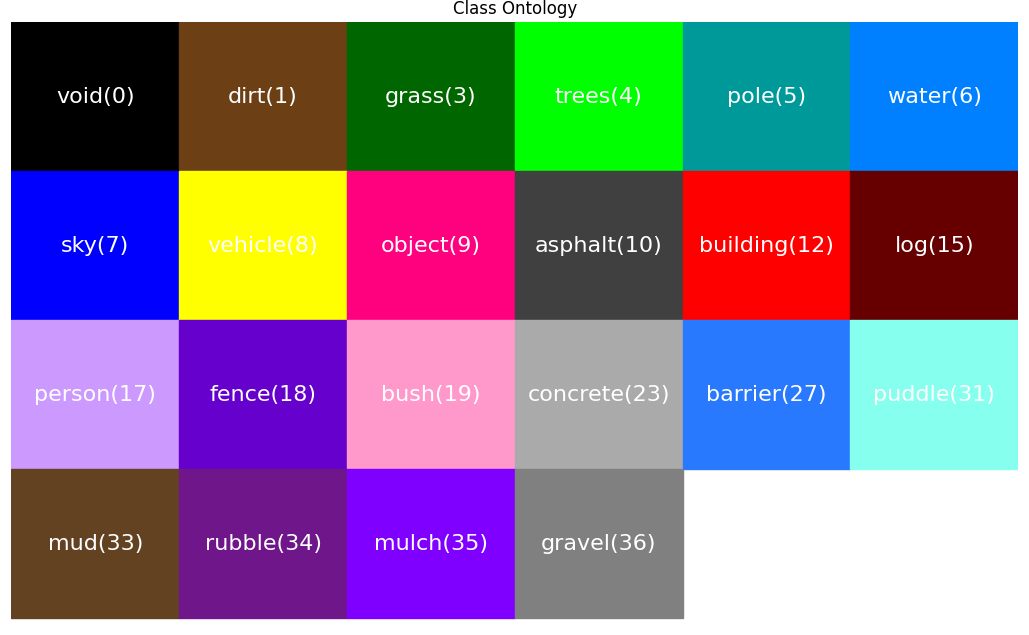
Ontology Download:
- Ontology Definition (Ontology)
{kind=link}
RGB Image Download:
-
Image with Annotation Examples (Download)
-
Full Images (Download)
-
Full Image Annotations Color Format (Download)
-
Full Image Annotations ID Format (Download)
Thermal Image Download:
-
Full Images (Download)
-
Full Image Annotations Color Format (Download)
-
Full Image Annotations ID Format (Download)
LiDAR Data
- Synced LiDAR Pointcloud Semantic-KITTI (Download)
RADAR Data
- Synced RADAR Polar Images (Download)
Calibration Download:
-
Camera Instrinsic (Download 2KB)
-
RGB Cameras to Ouster LiDAR (Download 3KB)
-
Boson Thermal to RGB camera (Download 3KB)
ROS Bag Raw Data
The following is the link to the rosbag.(Download)
Data included in raw ROS bagfiles:
| Topic Name | Message Tpye | Message Descriptison | |
|---|---|---|---|
| /Navtech/FFTData | nav_ross/HighPrecisionFFTData | Radar FFT data | |
| /lester/imu/data | sensor_msgs/Imu | Filtered imu data from embeded imu of Warthog | |
| /lester/imu/data_raw | sensor_msgs/Imu | Raw imu data from embeded imu of Warthog | |
| /img_node/intensity_image | sensor_msgs/Image | Intensity image generated by ouster Lidar | |
| /lester/imu/mag | sensor_msgs/MagneticField | Raw magnetic field data from embeded imu of Warthog | |
| /lester/lidar_points | sensor_msgs/PointCloud2 | Point cloud data from Ouster Lidar | |
| /lester/ouster_center/imu | sensor_msgs/Imu | Raw imu data from embeded imu of Ouster Lidar | |
| /lester/lidar_points_center | sensor_msgs/PointCloud2 | Centered point cloud data from Ouster Lidar | |
| /lester/lwir_front/camera_info | sensor_msgs/CameraInfo | Intrinsics of thermal camera | |
| /lester/lwir_front/image_rect/compressed | sensor_msgs/CompressedImage | sensor_msgs/Imu | Raw imu data from embeded imu of Ouster Lidar |
| /lester/stereo_left/camera_info | sensor_msgs/CameraInfo | ||
| /lester/stereo_left/image_rect_color/compressed | sensor_msgs/CompressedImage | Image from left RGB camera | |
| /lester/stereo_right/camera_info | sensor_msgs/CameraInfo | ||
| /lester/stereo_right/image_rect_color/compressed | sensor_msgs/CompressedImage | Image from right RGB camera | |
| /lester/rear_center/camera_info | sensor_msgs/CameraInfo | ||
| /lester/rear_center/image_rect_color/compressed | sensor_msgs/CompressedImage | Image from rear RGB camera | |
| /lester/ublox/fix | sensor_msgs/NavSatFix | INS data from ublox | |
| lester/right_drive/status/battery_current | std_msgs/Float64 | ||
| lester/right_drive/status/battery_voltage | std_msgs/Float64 | ||
| lester/left_drive/status/battery_current | std_msgs/Float64 | ||
| lester/left_drive/status/battery_voltage | std_msgs/Float64 | ||
| /lester/rc_teleop/cmd_vel | geometry_msgs/Twist | RC input to warthog | |
| /tf | tf2_msgs/TFMessage | ||
| /tf_static | tf2_msgs/TFMessage |