Annotated Data:
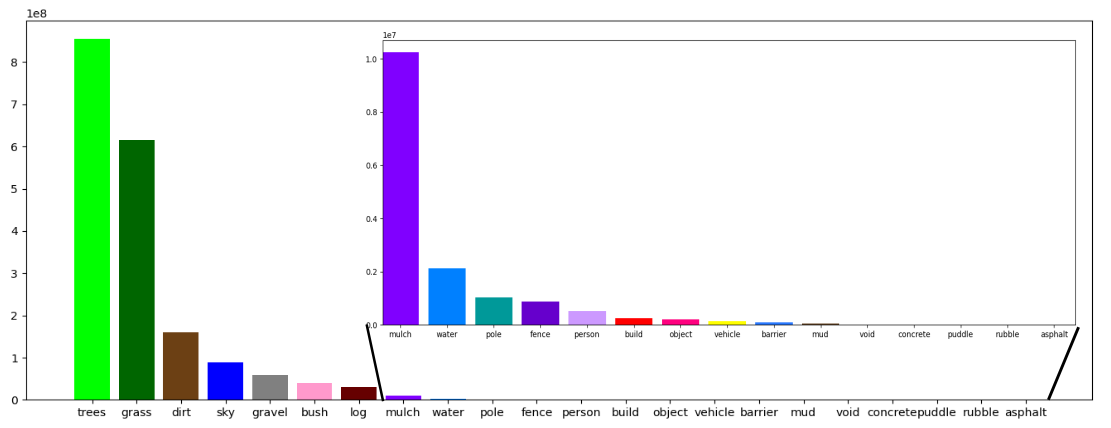
To provide multi-modal data for enhancing autonomous off-road navigation, we developed an ontology of object and terrain classes that extends the foundation of the RELLIS-3D dataset, while incorporating additional terrain and object categories specific to our dataset. Notably, our sequences introduce new classes such as gravel and mulch, which were absent in RELLIS-3D. Overall, the dataset encompasses 22 distinct classes, including trees, grass, dirt, sky, gravel, bush, mulch, water, poles, fences, persons, buildings, objects, vehicles, barriers, mud, concrete, puddles, rubble, asphalt, and a void class. This expanded ontology provides a more comprehensive understanding of off-road environments, offering enriched data for advanced semantic segmentation and improved performance in challenging, unstructured terrains.
Images Statics: