
SemanticUSL: A Dataset for LiDAR Semantic Segmentation Domain Adaptation
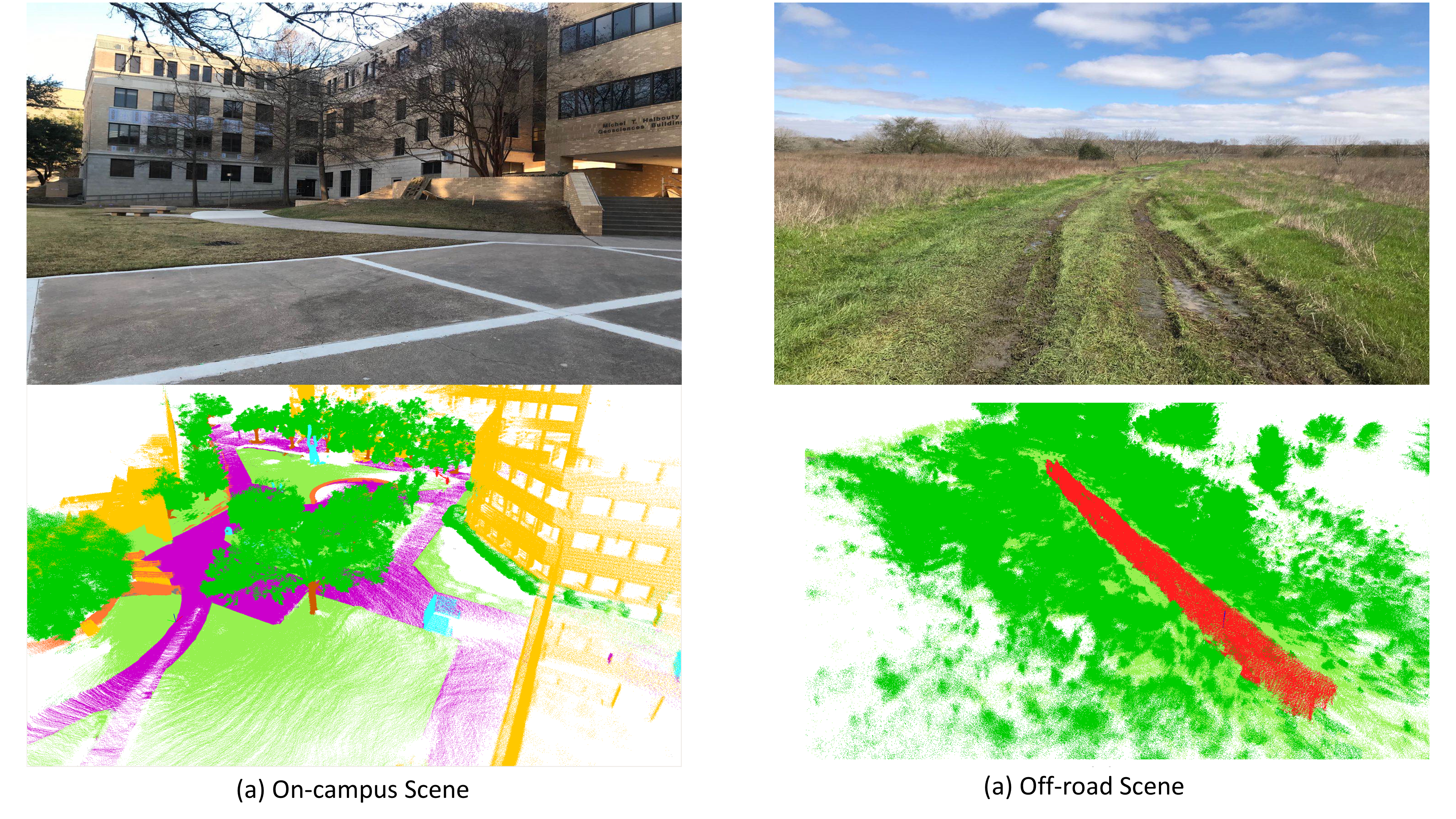
SemanticUSL was collected on a Clearpath Warthog robotics with an Ouster OS1-64 Lidar. The data collection location includes the campus site and off-road research facility of Texas A& M University. The data include the traffic-road scene, walk-road scene, and off-road scene. Our dataset has 16578 unlabeled scans for domain adaptation training and 1200 labeled scans for evaluation. The data uses the same format and ontology as SemanticKITTI; therefore, it can be easily used for domain adaptation research between SemanticKITTI and SemanticPOSS.

Download
Example Data link
Full Data link
Related Work
LiDARNet: A Boundary-Aware Domain Adaptation Model for Lidar Point Cloud Semantic Segmentation
RELLIS-3D: A Multi-modal Dataset for Off-Road Robotics
Citation
@misc{jiang2020lidarnet,
title={LiDARNet: A Boundary-Aware Domain Adaptation Model for Lidar Point Cloud Semantic
author={Peng Jiang and Srikanth Saripalli},
year={2020},
eprint={2003.01174},
archivePrefix={arXiv},
primaryClass={cs.CV}
}